
Back in the 1840s, Morse code was a ground-breaking approach for sending messages over a hot, new communications medium called the electrical telegraph. Earlier this year, the last telegram ever was sent, yet Morse code is not entirely out of a job. NASA’s cutting-edge Curiosity Mars rover, built by JPL (Jet Propulsion Laboratory), uses this practically ancient code to help determine where it is on a planet that has few landmarks, let alone a GPS network.
Matt Heverly, a JPL engineer and one of Curiosity’s drivers, explained how this dated system is still being put to good use:
For those who haven’t been following the mission, can you briefly describe its history?
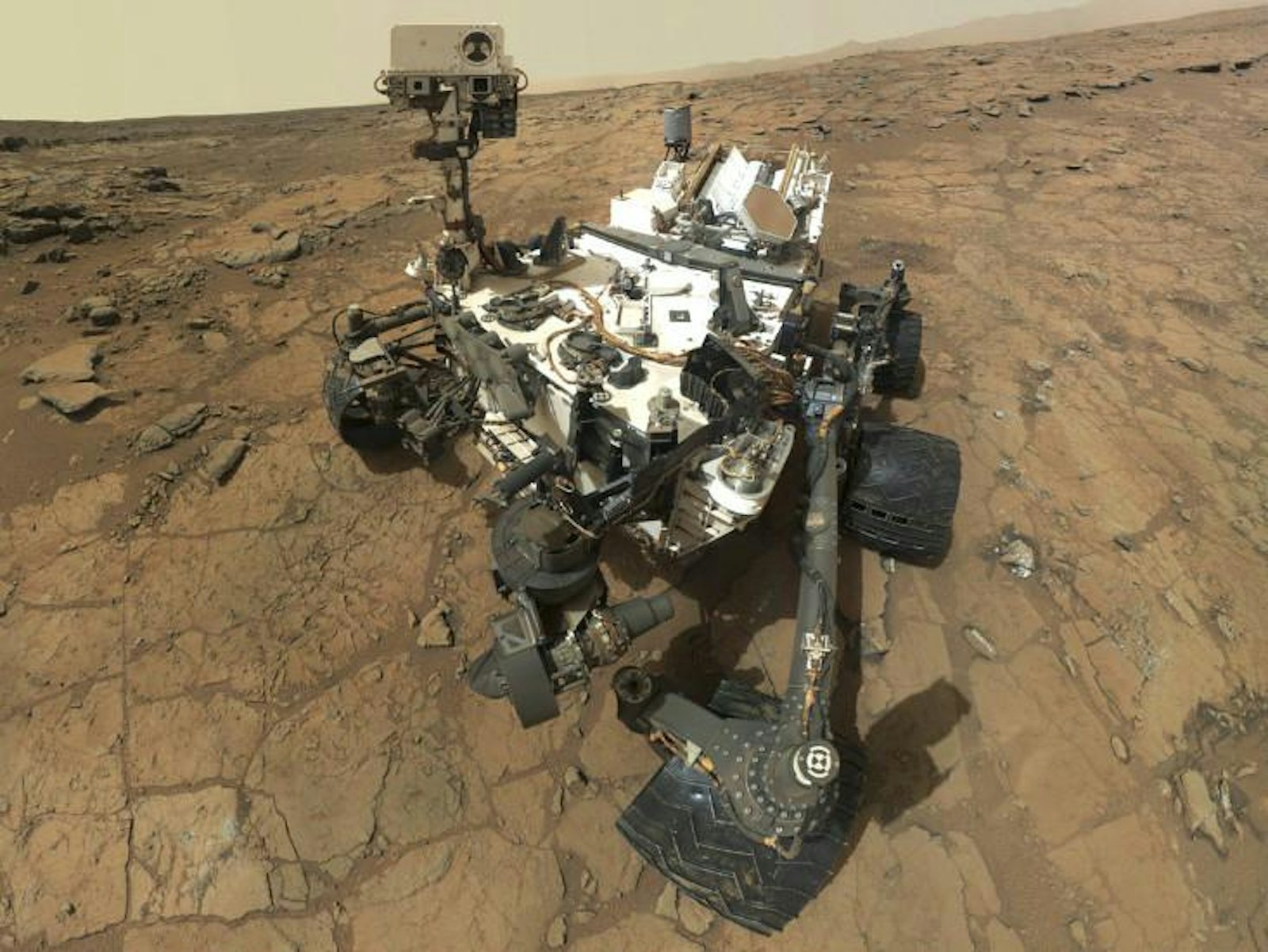
It launched on November 26, 2011. We packed this cool, giant rover into a rocket and launched it off to Mars. On August 5, 2012, it landed on the surface. The landing was a pretty spectacular event, in that it was a new system that we had to launch. It was very exciting because it was a whole new technology we developed to land the rover on Mars. The Curiosity rover weighs 900 kilograms [2,000 pounds]. It’s a six-wheeled rover with a robotic arm on the front.
In August 2012, when Curiosity landed on Mars, what were some of the first images it beamed back to Earth?
We saw the first image that was returned to the rover was a Hazcam image. The Hazcam is a small fisheye camera on the belly of the rover and we use it to look for obstacles as the rover drives. It was this beautiful mountain that’s taller than any mountain in North America. It’s taller than Mt. McKinley.
For those of us who were working on this project, there was no guarantee that it was going to work, so to see this first image is what really told me that this thing was on mars and that we could go explore.
How’s exploration been going so far?
It’s been amazing. The thing that’s fun for me is that missions like these are a true combination of engineering and science. Without scientists it’s just driving a remote control car on Mars. It’s really fantastic having this partnership.
Something great about the rover is that the scenery changes every day and new rocks are seen and you’re getting a little closer to getting to that mountain you’ve been looking at. The results are pretty spectacular.
What is the purpose of the pattern on the wheels?
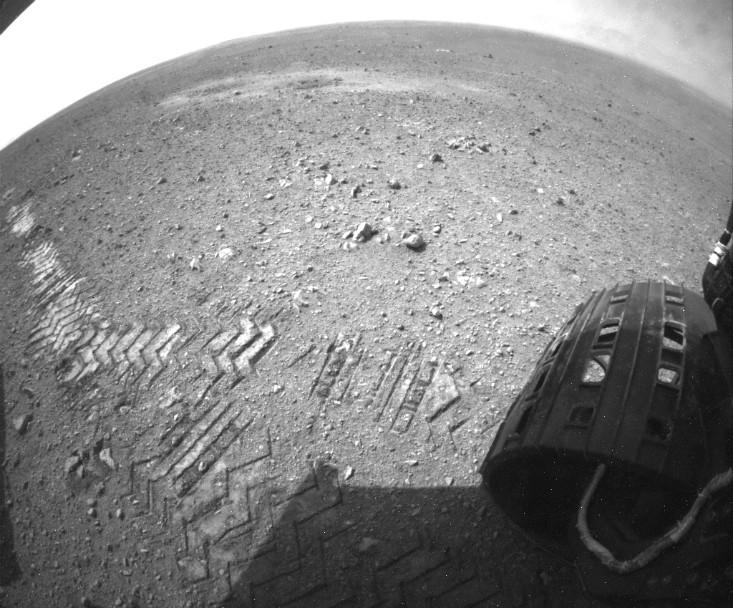
There’s this thing called visual odometry that helps the rover know how far it’s moved. When we lay down the tracks in the terrain it’s often useful to have a unique pattern that doesn’t repeat at the same consistency. As the wheels turn we don’t really know how far the rover moves because it can slip. The rover takes a picture and identifies a bunch of rocks and drives a meter or so and takes another picture. Then it looks and sees what distance the rocks moved.
But what if you are in sand dunes that don’t have any rocks? Well, one thing you can look at are the tracks. The cleats on the wheels leave this repeating pattern. So for example, if I look at a picket fence and close my eyes and move a little bit and open my eyes again I don’t really know how far I’ve moved because the picket fence looks the same. I need a picket that’s a different shape. That’s basically what happens with the rover.
What is the pattern or secret message hidden in the rover’s cleats?
What we ended up doing was creating a series of dots and dashes that just so happens to spell JPL in Morse code.
It’s a NASA mission, but we wanted to have a little bit of pride and left our mark in it in a little bit of a subtle way.

The diameter of the wheel is about 20 inches, so how many instances of JPL are there per rotation?
Every wheel rotation spells out JPL once. We have gone 3.9 kilometers [2.4 miles] so far on the surface of Mars. There are lots of instances of JPL across the surface.
How does visual odometry help Curiosity drive more accurately?
As we drive, we basically tell the rover to drive one meter straight ahead or turn 10 degrees.
We have to very precisely drive the rover to a target that’s several meters away.
We use autonomous navigation to allow the rover to safely navigate obstacles; there are hazardous rocks that can hurt it. The rover takes this series of images and it takes a three-dimensional terrain mesh to evaluate the area. It will choose the optimum path to get from where it is to get where it needs to go. So we’ll drive in a mode that we call “blind” to the top of this hill.
So what does the rover do when it gets to each location?
We only talk to the rovers twice a day, so we plan out an entire day of activities, an entire sol [Mars day], in those types of commands. We make this list and then essentially email it to the rover who reads the list and performs the commands. And at the end of the day, the rover emails us back, “Hey here are these pictures you asked me to take.” Then the rover goes to sleep at night because it’s very cold at night, and it relies on [solar] energy.
A Mars day is 30 minutes longer than an Earth day. We would always come to work at 5pm Mars time, whenever that happens to be.
How do you talk to it?
When we send commands to the rover, we uplink them to a high-gain antenna on the rover that points to Earth.
The rover wants to send us the data home but it has very low power. It only generates about a 100 watts of power continuously. That’s not much, because it’s power-intensive to beam messages to Earth.
So the Mars Reconnaissance Orbiter will talk to Curiosity, and MRO will hold that data from Curiosity and send it back to Earth. We have to use these orbital assets to get these broadband communications with the rover.
How fast does the rover travel, and to date, how much terrain has it covered?Seventyfive to 100 meters [250 to 300 feet] is kinda what we’re doing these days. Some days there’s a little ridge in front of us and we can only go 20 meters blind. It really is just the local topography of the terrain that dictates how far we can go. We’re typically limited by the total amount of time based on energy, since we use the sun to heat up the rover. Typically you can’t start driving until 1pm, so you only have a few hours to drive on any given day.
Where is Curiosity headed?
Our ultimate goal is to get to the base of Mount Sharp. We’re about 6 kilometers away now. Just like when you’re driving on a trip, there’s interesting stuff everywhere, but you can’t stop everywhere on the way to your destination. After going 150 meters further, we’ll be to our second scientific waypoint, at about the middle of next week. We’ll explore there a little bit and continue on to the next waypoint. It’s going to be a long drive, but there are lots of great things to look at as we go.
What are the waypoints?
The geologists have chosen these waypoints because they are unique on the way to the mountain. We’ll do everything from take some pictures to drill and do a much more involved campaign. A lot we don’t know until we get there, and that’s part of beauty of exploration.
Clearly there’s a lot to uncover about Mars.
We’re laying the groundwork for the next mission in 2020. We’re making discoveries that are informing the next group of scientists that will keep uncovering the mysteries.