
Several years ago, a group of American cockroaches discovered four strangers in their midst. A brief investigation revealed that the interlopers smelled like cockroaches, and so they were welcomed into the cockroach community. The newcomers weren’t content to just sit on the sidelines, however. Instead, they began to actively shape the group’s behavior. Nocturnal creatures, cockroaches normally avoid light. But when the intruders headed for a brighter shelter, the rest of the roaches followed.
What the cockroaches didn’t seem to realize was that their new, light-loving leaders weren’t fellow insects at all. They were tiny mobile robots, doused in cockroach pheromones and programmed to trick the living critters into following their lead. The demonstration, dubbed the LEURRE project and conducted by a team of European researchers, validated a radical idea—that robots and animals could be merged into a “biohybrid” society, with biological and technological organisms forming a cohesive unit.
A handful of scientists have now built robots that can socially integrate into animal communities. Their goal is to create machines that not only infiltrate animal groups but also influence them, changing how fish swim, birds fly, and bees care for their young. If the research reaches the real world, we may one day use robots to manage livestock, control pests, and protect and preserve wildlife. So, dear furry and feathered friends, creepy and crawly creatures of the world: Prepare for a robo-takeover.

Nature has long been a source of inspiration for roboticists. Engineers commonly borrow from biology to design robots that move in novel ways, yielding machines that undulate like snakes, climb like geckoes, or glide like manta rays. But when LEURRE launched in 2002, the research team aimed to reach beyond bio-mimicry. By then, collective behavior had become a hot topic in both biology and robotics. “We started thinking, we have on one side the animals capable of doing those collective behaviors, and we have on the other side those robots being built by roboticists that are able to replicate that same kind of collective behavior,” says José Halloy, the physicist who served as the scientific coordinator of LEURRE while at the Free University of Brussels, Belgium. “If we establish a link between the two, well then obviously we will have a mixed group that will act collectively.” What’s more, Halloy says, the researchers believed they might be able to use the robots to influence the group’s natural behavior.
 The team started with cockroaches, which aren’t as social as, say, ants or bees, but demonstrate some collective behavior. In particular, they shelter together in large groups; a cockroach is much more likely to hang his arthropod hat at a hideaway that’s home to other roaches than to strike out on his own for a vacant resting place. Halloy and his colleagues set out to create mobile, insect-like robots, or InsBots, that could manipulate a group of real roaches’ decisions about where to rest.
The team started with cockroaches, which aren’t as social as, say, ants or bees, but demonstrate some collective behavior. In particular, they shelter together in large groups; a cockroach is much more likely to hang his arthropod hat at a hideaway that’s home to other roaches than to strike out on his own for a vacant resting place. Halloy and his colleagues set out to create mobile, insect-like robots, or InsBots, that could manipulate a group of real roaches’ decisions about where to rest.
The first step was to create robots that could intermingle with live cockroaches. Fortunately, the machines didn’t need to be exact replicas of the insects. “That’s good news for roboticists because it’s very difficult to copy an animal,” says Halloy, who is now at Paris Diderot University in France. “What matters is that the robots are sending the relevant cues to the animal.” The trick is to identify the few key social signals—which vary from species to species and can be visual, auditory, olfactory, or tactile—that will allow robots to communicate with their flesh-and-blood counterparts.
“Wow, they can be squashed by the robot. We are going to kill some of them if this continues.”
Cockroaches identify their comrades by smell, so Halloy and his colleagues wrapped their matchbox-sized InsBots in filter paper soaked in cockroach pheromones. They placed the robots, along with a dozen real roaches, into a circular arena that contained two different shelters, one darker than the other. In earlier tests, the real roaches had revealed a clear preference for darkness, choosing to aggregate in lighter refuges only 27 percent of the time.
When the researchers introduced the InsBots, which were programmed to prefer the lighter shelters, the entire group’s preference for light more than doubled—the mixed society of roaches and robots ended up in the lighter shelter 61 percent of the time.
Halloy’s team provided a compelling proof of principle, but the researchers dreamed of doing more than bossing cockroaches around. Since their roach results were published in Science in 2007, they’ve been figuring out how to integrate robots into other critter communities.1 In one follow-up project, Halloy and Francesco Mondada, a roboticist at the Swiss Federal Institute of Technology in Lausanne in Switzerland, chose to work with chickens and exploit the well-documented phenomenon of filial imprinting, in which newly hatched chicks form nearly instantaneous social attachments to their mothers. Since the 1930s, biologists have known that chicks imprint on nearly any moving object they encounter in the early hours of their lives, from a person to a model train. This phenomenon was well documented by the zoologist Konrad Lorenz, who was famously photographed with a trail of ducklings waddling along behind him.
Halloy and Mondada knew that their surrogate mother didn’t need to look like a bird, but research had shown that it would help if it were approximately the right size, so they built a cylindrical, hen-sized mobile robot. Because studies had also revealed that chicks are more likely to imprint on objects that make noise, and stand out from the background, the researchers equipped the robot with a speaker that beeped and installed several rings of lights that displayed changing color patterns. Nine-hour-old chicks then watched through a Plexiglass wall as the so-called PoulBot traveled back and forth, beeping. After each chick had undergone three of these hour-long imprinting sessions, it was placed into the experimental arena with the PoulBot.
About 60 percent of the 213 chicks tested followed the PoulBot closely as it cruised around the arena. In fact, some of the chicks were so attracted to the robot that the researchers had to wrap the robot in a Plexiglass bumper so the birds wouldn’t get caught in the robot’s wheels. “We said, ‘Wow, they can be squashed by the robot. We are going to kill some of them if this continues,’ ” Halloy recalls.
With PoulBot leading the way, biologists might learn new things about bird behavior. “By having control of robots that are inside the group,” Mondada says, “you can do some experiments on the working principles of those societies.” For instance, how does a group of chicks act when only a fraction of the flock strongly imprints on a mother figure? And does following behavior change with age? The researchers are still analyzing their data, but they hope that the PoulBot can help answer these and other questions—and do so in a controlled, easily replicable way. Robots, after all, are the kings of consistency, able to perform the same way in trial after trial.

Several researchers have already begun using biomimetic robots to probe animal behavior. With the help of robots, researchers at The University of Texas at Austin, for example, demonstrated that female Túngara frogs are attracted not only to the sound of male frogs’ calls, as was already known, but also to the sight of their expanding vocal sacs.
Robots might also help us control animal behavior outside the laboratory. Mondada imagines a world where robots shepherd free-range chickens out of their coops in the morning and back at night, for example. Robo-sheep or –cattle could one day lead real herds. (In 1999, a robotic sheepdog named Rover corraled a flock of ducks and drove them toward a designated location. The robot was not designed to pass as a duck, however, or forge a social connection with them, and probably worked simply by scaring the birds.) By tapping into animals’ social behavior and channels of communication, farmers may be able to manage their livestock in a more “natural,” humane way, Mondada says, without needing to rely on restrictive physical measures, such as electric fences or barbed wire.
For Maurizio Porfiri, an engineer at the New York University Polytechnic School of Engineering who has built a series of robotic fish, protecting wild animals has always been the goal. “My feeling was that all this technology that was inspired by nature, was never utilized in nature itself,” Porfiri says.
Another possibility is to use the robots to manipulate “nurse” bees into taking better care of the colony’s brood.
Porfiri hopes to develop robotic fish that guide wild fish away from hazards such as oil spills and dams. His work so far suggests that it’s a plausible idea. Using a water tunnel to recreate the conditions fish might face while swimming in a flowing river, he discovered that when a plastic fish robot beats its motorized tail at just the right frequency, live golden shiners swim along behind it. At these frequencies—which vary according to the speed at which the water is flowing—fish in the wake of the robot “obtain a hydrodynamic advantage,” Porfiri says, meaning that they need to expend less energy to swim. The finding taught his team how fish robots will need to move in order to be effective leaders in the wild.
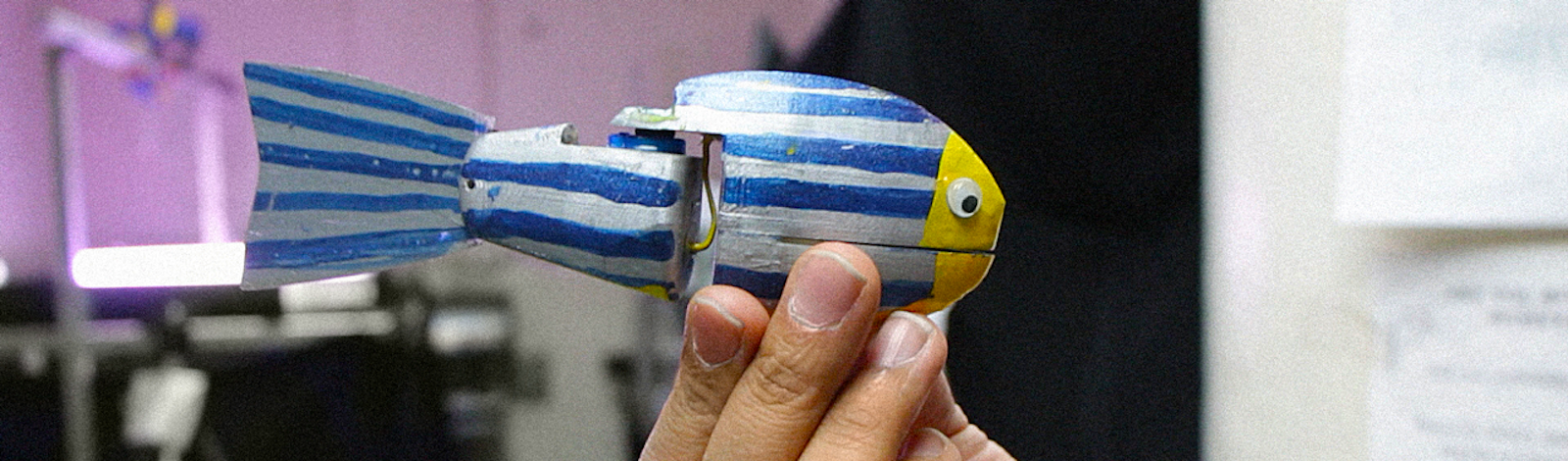
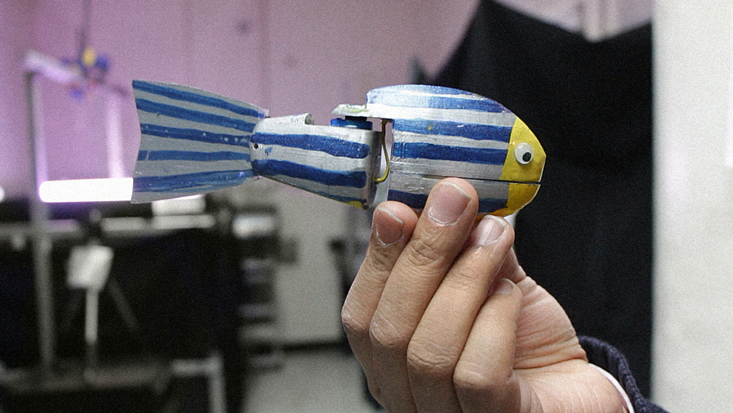
Robots may also ward off unwanted species. Over the last several years, Porfiri has developed a mobile robot that resembles a zebrafish; the machine is covered in bright blue and silver stripes, with a few splotches of yellow pigment, and has the slightly rounded shape of a fertile female fish. In a study published last year, Porfiri showed that while the robot attracts zebrafish, it repels mosquitofish, an aggressive invasive species.2 Over the past century, people deliberately introduced mosquitofish into a variety of new habitats because they eat mosquito larvae. But now, the fish cause significant damage to local amphibian and fish species by eating their eggs and young. In their native habitats, mosquitofish are preyed upon by brightly colored sunfishes, so when the mosquitofish viewed the robot, with its electric blue and yellow paint, it might have perceived it as a predator and been scared away. Similar robots could one day be deployed in the wild to keep invasive species out of critical habitats, Porfiri says.
Now Porfiri is scaling up, trying to understand how to integrate more than one robot into a group of fish. “It’s not practical to have one robot controlling a big group,” he says. “So you need multiple robots. How should these robots coordinate with each other to influence the behavior of a group? That’s a fundamental question.”
In Halloy and Mondada’s latest endeavor, they are attempting to pull off the same feat with zebrafish as they once did with cockroaches, using a group of biomimetic robots to manipulate the animals’ choice of shelter. The work is part of ASSISIbf, a five-year project launched last year that involves scientists in six European countries. (The project is named after St. Francis of Assisi, who reportedly had a gift for communicating with animals.)
In addition to working with zebrafish, the scientists are also developing a network of 64 robots to interact with honeybees. The robots, which are still in development, will generate heat, light, vibrations, and electromagnetic fields—all stimuli known to affect bee behavior. The researchers hope to be able to use a combination of these stimuli to encourage all the bees to aggregate at a single specific location. “As soon as we can do that, we will do other tasks like split up a group of bees into two swarms or four sub-swarms or maneuvering the swarm around,” says Thomas Schmickl, a zoologist at the University of Graz, in Austria, who is leading the project. Eventually, Schmickl says, beekeepers may be able to install this kind of robotic system in a bee hive, using it to encourage bees to take more pollination flights, for instance, or to go out looking for food at a certain time of day.
Another possibility is to use the robots to manipulate “nurse” bees into taking better care of the colony’s brood. If a higher percentage of larvae survive to adulthood, it could help boost the declining bee population and provide more pollinators to tend to our food crops. “There is always a loss in the brood in a honeybee colony, but if you can control the nurses, you can affect the losses, probably,” Schmickl says.
In an unrelated project, scientists at the Free University of Berlin in Germany have developed a honeybee robot that can do a basic waggle dance—a complex series of movements bees naturally perform, seemingly to communicate with each other about where food sources are located. Once refined, waggle-dancing robots could potentially be used to drive real bees to fly to specific locations.
It wouldn’t be the first time an outsider manipulated bees by pretending to be one of the gang. Certain orchids, for example, trick male bees into pollinating them by displaying petals shaped like beckoning female bees. In comparison, the roboticists’ plans are gracious. The grand union of beasts and ’bots may ultimately make animal societies stronger; a little robo-leadership could cause some species’ stock to soar.
Emily Anthes is a Brooklyn-based freelance science journalist and author of the book Frankenstein’s Cat: Cuddling Up to Biotech’s Brave New Beasts.
References
1. Halloy, J., Sempo, G., Caprari, G. Rivault, C., Asadpour, M., et al. Social Integration of Robots into Groups of Cockroaches to Control Self-Organized Choices. Science 318, 1155-1158 (2007).
2. Polverino, G. and Porfiri, M. Zebrafish (Danio rerio) behavioral response to bioinspired robotic fish and mosquitofish (Gambusia affinis). Bioinspired Biomimetics 8, 044001 (2013).